Thread Validator Tutorials

The Tutorials
Getting Started
User Interface Mode
How to interpret the thread validator displays
Analysing an Application
Good Lock Strategy
Deadlock using two threads
Potential deadlock caused by incorrect locking strategy.
Potential deadlock caused by an infinite wait.
Leaving an unlocked critical section.
Deleting a locked critical section.
Leaving a critical section in the wrong order.
Identifying deadlock objects when not collecting callstacks.
Analysing an existing deadlocked application.
Getting information about a threading error.
Detecting deadlocks in a child process
Detecting deadlocks in a service
Detecting deadlocks in a service child process
Detecting deadlocks in an IIS ISAPI DLL
Command Line Deadlock Detection in a Child Process
detecting deadlocks in a service
This tutorial describes how to detect deadlocks a service.
This tutorial covers the following:
-
- Modifying a service to use the NT Service API.
- How to use the Thread Validator user interface to detect deadlocks in the service.
Related tutorials:
Detecting deadlocks in a child process.
Detecting deadlocks in a service child process.
Detecting deadlocks in an IIS ISAPI DLL.
Detecting deadlocks for a child process from the command line.
Native services and mixed-mode services
This tutorial applies to all native services and to mixed-mode services that start the service that uses the native Win32 services API.
.Net services
If your service is written entirely in .Net or .Net Core, or your service is mixed-mode with the startup code written in .Net or .Net core you can skip the part of this tutorial relating to the NT Service API and go straight to the detecting deadlocks in a service section.
Example Service
Thread Validator ships with an example service in the examples\service folder in the Thread Validator installation directory.
Installing the example service
- Open an administrator mode cmd prompt
- Type serviceTV_x64.exe -install
Starting the example service
- Open an administrator mode cmd prompt
- Type serviceTV_x64.exe -start
or
- Start the services control panel (type services in the Windows 10 search bar, then choose the Services app).
- Find the service in the list of services, right-click to display the context menu, then choose Start.
Stopping the example service
- Open an administrator mode cmd prompt
- Type serviceTV_x64.exe -stop
or
- Start the services control panel (type services in the Windows 10 search bar, then choose the Services app).
- Find the service in the list of services, right-click to display the context menu, then choose Stop.
Uninstalling the example service
- Open an administrator mode cmd prompt
- Type serviceTV_x64.exe -remove
The service has already been modified to use the NT Service API. In this tutorial, we’ll describe the modifications you would make to the service to make it work correctly with Thread Validator.
What is the NT Service API?
The NT Service API is a simple API that allows you to load the Thread Validator profiling DLL and start the process of detecting deadlocks.
The API also includes some debugging functions to help provide debugging information via log files (the only way to get data out of a service without a connection to the Thread Validator user interface).
Modifying your service to use the NT Service API
- Identify your service’s ServiceMain function, and just before that function, add a new function definition called serviceCallback(). In the example service, the ServiceMain is called service_main().
The purpose of serviceCallback() is to regularly tell the service control manager that the service is alive. This prevents the service from being killed for being unresponsive if the instrumentation of your service takes too long (where too long is defined by the service control manager).
void serviceCallback(void *userParam) { // just tell the Service Control Manager that we are still busy // in this example userParam is not used static DWORD dwCheckPoint = 1; ssStatus.dwServiceType = SERVICE_WIN32_OWN_PROCESS; ssStatus.dwServiceSpecificExitCode = 0; ssStatus.dwControlsAccepted = 0; ssStatus.dwCurrentState = dwCurrentState; ssStatus.dwWin32ExitCode = dwWin32ExitCode; ssStatus.dwWaitHint = dwWaitHint; ssStatus.dwCheckPoint = dwCheckPoint++; // Report the status of the service to the service control manager. return SetServiceStatus(sshStatusHandle, &ssStatus); } - At the start of service_main() set the log file name and delete the log file, erasing any logging from a previous run of the service. This is to prevent debugging information from one session from interfering with another.
svlTVStub_setLogFileName(SZLOGFILENAME); svlTVStub_deleteLogFile();
- After the call to RegisterServiceCtrlHandler(), load the Thread Validator profiling DLLs with a call to svlTVStub_LoadThreadValidator(), or if you’re profiling x86 service from the x64 GUI call svlTVStub_LoadThreadValidator6432(). The return code should be checked to identify success or to be converted into a human-readable string to be written to the log file.
#ifdef IS6432 // x86 with x64 GUI errCode = svlTVStub_LoadThreadValidator6432(); #else //#ifdef IS6432 // x86 with x86 GUI // x64 with x64 GUI errCode = svlTVStub_LoadThreadValidator(); #endif //#ifdef IS6432 if (errCode != SVL_OK) { DWORD lastError; lastError = GetLastError(); svlTVStub_writeToLogFileW(_T("Thread Validator load failed. \r\n")); svlTVStub_writeToLogFileLastError(lastError); svlTVStub_writeToLogFile(errCode); svlTVStub_dumpPathToLogFile(); } else { svlTVStub_writeToLogFileW(_T("Thread Validator load success. \r\n")); } - Next, we inform Thread Validator about the service callback. This must be done after the Thread Validator DLLs are loaded, not before.
errCode = svlTVStub_SetServiceCallback(serviceCallback, // the callback NULL); // some user data if (errCode != SVL_OK) { svlTVStub_writeToLogFileW(_T("Setting service callback failed. \r\n")); svlTVStub_writeToLogFile(errCode); } - Finally, we start Thread Validator instrumenting your service to detect deadlocks.
errCode = svlTVStub_StartThreadValidator(); if (errCode != SVL_OK) { DWORD lastError; lastError = GetLastError(); svlTVStub_writeToLogFileW(_T("Starting Thread Validator failed. \r\n")); svlTVStub_writeToLogFileLastError(lastError); svlTVStub_writeToLogFile(errCode); } else { svlTVStub_writeToLogFileW(_T("Finished loading Thread Validator\r\n")); }
Detecting deadlocks in the service
Now that the NT Service API has been implemented in your service, we can start detecting deadlocks in the service.
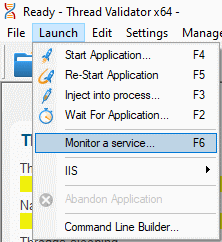
- Choose the Launch > Monitor a service… option.
- The Monitor a service dialog is displayed.
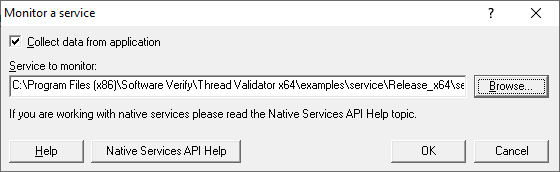
Select the service executable you are going to monitor. For this example the application is examples\service\Release_x64\serviceTV_x64.exe.
- When you click OK, Thread Validator will set up everything needed to interact with the NT Service API and then present you with a dialog box.
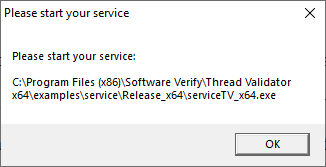
- Start your service.
- Close the dialog box.
- Thread Validator will instrument your service and start detecting deadlocks.
Finishing detecting deadlocks
To finish detecting deadlocks, you need to stop your service.
Thread Validator will continue monitoring deadlocks during the service shutdown procedure and then present you with the deadlocks and threading report.
I’m not getting any thread and lock data. What can I do?
There are a few things to check.
- Have you correctly added the NT Service API to the service?
- Check the log file for any errors. You specified the log file in step 2 with the call
svlTVStub_setLogFileName(SZLOGFILENAME);
- Check the diagnostics tab. If the NT Service API is working correctly Thread Validator will have some data. Information on instrumentation failures will be on the diagnostic tab.
- Check the debug information dialog. You can access this from the Tools > DLL Debug Information… menu. This dialog will tell you which DLLs have debug information and which do not. Any DLLs that don’t have debug information you’ll need to ensure that debug information is built for these DLLs and is findable.
Conclusion
You have learned how to add the NT Service API to a native service, how to use Thread Validator to monitor a service, and what to look at to diagnose errors if things don’t work first time.